Seguidor de Línea
PROYECTO FINAL "SEGUIDOR DE LÍNEA"
Daniel Durango
(2042892) Joshua Arango (2042309) Juan Mendez (2040448)
Universidad del
Valle, Facultad de ingeniería
Introducción a la
ingeniería electrónica – 710100 M
Asfur Barandica – Julio Urbano
Fase I
Los robots seguidores de líneas son robots que tienen un único objetivo, que es seguir la línea o calle de color negro. Todo el movimiento que tiene este vehículo se debe a los sensores que se encuentran adjuntos para detectar el camino, su funcionamiento consiste en detectar el reflejo de la señal infrarroja, es decir, cuando estos detectan su señal reflejada por la luz, permiten el paso de corriente eléctrica. Nosotros escogimos el sensor CNY70, el protoboard, LEDs y un arduino UNO ya que estos son necesarios y acordes a lo estipulado para nuestro vehículo, las llantas las escogimos con un tamaño adecuado para que alcance mayor velocidad, escogimos un motorreductor ya que gracias a su configuración nos sirve para mover un peso considerable, además si se minimiza los pesos de las estructuras, se llegará a tener un buen funcionamiento en cuanto a potencia, escogimos la batería de 9 voltios ya que por diseño, peso, y capacidad de almacenamiento, es la más adecuada para nuestro prototipo.
Los materiales se escogieron a partir de una investigación sobre proyectos similares, llegando a la conclusión de que estos son los ideales.
Los valores monetarios están dados en Pesos Colombianos, aquellos que no poseen cifra, son elementos que ya se tenían con anterioridad.
(2) sensores CNY70 ($5400) = El sensor permite guiar al vehículo, evitando que se salga del camino.

Resistencias varias = Sirve para oponerse al flujo de corriente.

(4) Transistores 2N2222A ($1200) = Amplifica las señales de corriente que los sensores envían al microcontrolador.

|
Característica |
Símbolo |
Valor y unidad |
|
Tensión Colector- Emisor |
VCEO |
50V DC |
|
Tensión Colector-Base |
VCBO |
75V DC |
|
Tensión Emisor - Base |
VEBO |
6V DC |
|
Corriente Colector |
IC |
800mA DC |
(2) LED ($400) = Estos nos brindan una señal lumínica, que sirven para identificar cuando los sensores se activan.

(2) Motorreductores 110 RPM y llantas ($22000) = Sirven para dar movimiento a la estructura del robot.
-Voltaje: 3v-12v
-Consumo de
corriente sin carga: 70 mA
-Velocidad: 110
RPM a 3v

(1) Batería 9 Volts (250 mAh) ($28.000)= Sirve para alimentar los circuitos, liberando energía para su funcionamiento.


(1) Protoboard ($) = Nos permite insertar y conectar algunos componentes para formar un circuito electrónico.

(1)Driver puente H L298n ($16.000) = Sirve para invertir el giro de los motores.

(1) Controlador (Arduino UNO) ($)= Nos permite controlar el hardware de nuestro robot y ejecutar instrucciones.

(1) Interruptor ($1.000) = Sirve para poder encender y apagar el circuito.

(1) Cartón Blanco Moteado ($) = Utilizado como material del chasis, por su característica de rigidez y bajo peso.

(1) Cinta doble faz ($2000) = Utilizado para adherir los elementos del robot al chasis.

La estructura de nuestro robot se definió principalmente en función de la forma de la protoboard, a partir de esto, se diseñó el chasis que fue plasmado en cartón, además se le hizo una especie de bomper en el cual los sensores infrarrojos van a ir protegidos, la batería va en la zona de abajo y en el centro tratando de no afectar la distribución de masa, luego, se buscó posicionar el arduino y el puente H, y se determinó que irían encima de la protoboard. Nuestro robot tiene medidas de 20 cm de largo, 10 cm de ancho y 9 cm de altura.
Planos del robot:


Vista lateral:

Vista frontal:

|
Elementos |
Frontal |
Lateral |
Superior |
|
LED: |
 |
 |
 |
|
Arduino UNO |
 |
||
|
Pila de 9V |
 |
 |
 |
|
Protoboard |
 |
||
|
Llanta |
 |
- Informe describiendo el sistema de alimentación, la placa seleccionada y el programa desarrollado.
- Plataforma con los nuevos montajes realizados.
Fase 2. Definición, especificación e implementación del sistema de alimentación del robot y primera aproximación a la plataforma Arduino.
En lo referente al sistema de alimentación, se debe especificar el voltaje, capacidad de almacenamiento de energía, dimensiones, protecciones y demás características que considere de importancia para el diseño. Adicionalmente, se debe presentar la tarjeta Arduino controlando el encendido de dos leds a partir de la interacción con dos pulsadores.
Microcontolador a utilizar: Arduino UNO.

|
CARACTERSTICAS
ARDUINO UNO |
|
|
CONCEPTO |
ESPECIFICACIÓN |
|
Microcontrolador |
ATmega328 |
|
Voltaje de Operación |
5V |
|
Voltaje de entrada
(recomendado) |
7-12V |
|
Voltaje de entrada (límite) |
6-20V |
|
Pines de E/S digitales |
14 (de los cuales 6 tienen
salida PWM) |
|
Pines de entrada analógica |
6 |
|
Corriente DC por pin de E/S |
40mA |
|
Corriente DC para 3.3V Pin |
50mA |
|
Memoria Flash |
32KB |
|
SRAM |
2KB |
|
EEPROM |
1KB (ATmega328) |
|
Velocidad de reloj |
16MHz |

|
CARACTERÍSTICAS
BATERÍA |
|
|
CONCEPTO |
ESPECIFICACIÓN |
|
Marca |
Beston |
|
Modelo |
BST-9V |
|
Voltaje DC |
9V |
|
Corriente |
250mA |
|
Medidas |
4.7 cm x 2.5 cm x 1.5 cm |
|
Peso |
35g |
|
Tipo |
Ni-Mh - Recargable Níquel – Metal Hidruro |
Con esta batería, nuestro robot tendrá una autonomía aproximada de 1,6 horas.
Consumo del Arduino UNO= 46 mA
Consumo del puente H L298n= 36 mA
Consumo motores sin carga= 70 mA
Obteniendo un total de consumo de 152 mA.
Autonomía= 250 mA/152 mA=1.6 h, lo que es igual a 96 minutos o 1 hora con 36 minutos.
Algo curioso es que para realizar la carga de la batería se efectuó el empalme de dos cabezales conectores de baterías para que hiciesen la función de extensión. El calibre de estos cables es AWG 26, los cuales soportan como máximo 0.361 A, lo que es igual a 361 mA. El cargador tiene de salida 9V a 35 mA.
Incluyendo estos componentes en nuestro robot, lo presentamos de la siguiente manera:

Vista frontal:

Vista lateral:



Control de Leds usando la placa Arduino.
En este punto, se nos asignó la tarea de controlar el encendido de 2 leds mediante 2 pulsadores utilizando el microcontrolador de arduino, para ello se realizó el código en el software de arduino, la simulación en Proteus y por último la simulación en físico.
Código: https://drive.google.com/file/d/19o6liuwdoqKfTTAEfu-POwetP9v9OCIM/view?usp=sharing
Simulación en Proteus:
https://drive.google.com/file/d/1vZ0y4JQwwv59DDkWeJtjGwUmg-eSlCS4/view?usp=sharing
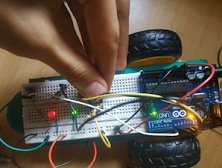
Montaje físico

Encendido led 1 (rojo)


Conclusiones de Fase 2:
En esta fase se nos hizo un acercamiento ante las plataformas Arduino y Proteus, además de implementar un montaje físico controlando unos leds. Para la creación del código se utilizó como base los instrumentos brindados por el monitor Julio, donde nos explicó acerca de la estructura de la aplicación y su implementación, en cuanto al circuito de Proteus, tuvimos que insertar la librería de arduino para poder realizar las conexiones. Para el montaje físico se hizo uso de la bateria Beston 250 mA, protoboard, 2 leds (uno verde y uno rojo), cables de arduino para las conexiones, 1 switch y un interruptor, resistencias y el Arduino UNO.
Fase III:
Los sensores usados
son los CNY70, este es un sensor óptico
por reflejo combinando un led infrarrojo emisor y un fototransistor receptor en
un mismo módulo. A continuación, vamos a mostrar como quedo el sensor
estabilizado en el robot:
Después
de ver la manera como está quedando el robot, le diseñamos un diagrama de
bloques para ver su funcionamiento de una forma más organizada y sencilla de
entender.

Sensor CNY70:
El dispositivo CNY70 es un sensor óptico infrarrojo, de un rango de corto alcance que se utiliza para detectar colores de objetos y superficies.

Contiene un emisor de radiación infrarroja (fotodiodo) y un receptor
(fototransistor). El fotodiodo emite un haz de radiación infrarroja, el
fototransistor recibe ese haz de luz cuando se refleja sobre alguna superficie
u objeto.
Dependiendo de la cantidad de luz recibida por el fototransistor el
dispositivo envía una señal de retorno a una tarjeta controladora como Arduino.
Debido a que el sensor está configurado como un switch, la programación en el software de Arduino sigue siendo la misma a la de la anterior fase.
|
ESPECIFICACIONES SENSOR CNY70 |
|
|
Tipo de Emisor |
Fotodiodo IR |
|
Tipo de detector |
Fototransistor |
|
Dimensiones
(Largo x Ancho x Alto) en mm |
7 x 7 x 6 |
|
Distancia de
funcionamiento máximo |
<0.5mm |
|
Longitud de onda
del emisor |
950nm |
Montaje
simulado en Proteus sobre el sensor CNY70 en el Arduino.
https://drive.google.com/file/d/1vr2l8huBIAUKZKEfStB1jhJTJ3dqEkf8/view?usp=sharing
Diagrama de flujo del
funcionamiento del sensor CNY70

Esquema
CNY70

Este es el esquema que se nos brinda en el datasheet del sensor, donde tenemos 4 pines. Para verlo tal cual como en el esquema, debemos poner la cara del área marcada del sensor en dirección hacia la derecha, siendo el pin superior izquierdo el ánodo, el pin inferior izquierdo el cátodo, el pin superior derecho el emisor y el pin inferior derecho el colector.


Funcionamiento del
sensor.
El sensor está en
funcionamiento, actuando como un switch cerrado, ya que se encuentra en su
rango de medición y puede recibir su señal, por lo cual se encienden los leds.

En este montaje, se
eleva el seguidor de línea, por lo cual el sensor está fuera de rango y no
recibe su señal, lo que conlleva a actuar como un switch abierto, por lo cual
los leds no se encienden.

Video Funcionamiento
https://drive.google.com/file/d/1zdgbcDtDkVi0O2jR82xCZOuMEJXKwPBZ/view?usp=sharing
Conclusiones fase 3:
En esta fase pudimos comprender el funcionamiento de nuestro sensor CNY-70, teniendo en cuenta sus características y su rango de funcionamiento para así mismo acoplarlo a nuestro proyecto de Robot Seguidor de Línea, también aprendimos a identificar las diversas partes en que se divide nuestro sistema.
Fase IV:
- Funcionamiento Puente H
Es usado para controlar motores de corriente continua y de baja tensión, esto permite que el motor eléctrico pueda girar en ambos sentidos, avanzar y retroceder, esto sucede ya que el puente H hace un corto entre las bornas del motor. El puente H tiene 4 interruptores ya puede ser mecánico o transistores y esto puede ocasionar un movimiento como se muestra en la siguiente tabla:
|
S1 |
S2 |
S3 |
S4 |
Resultado |
|
1 |
0 |
0 |
1 |
El motor gira para avanzar |
|
0 |
1 |
1 |
0 |
El motor gira para retroceder |
|
0 |
0 |
0 |
0 |
El motor se detiene bajo inercia |
|
1 |
0 |
1 |
0 |
El motor gira para ir a la derecha |
|
0 |
1 |
0 |
1 |
El motor gira para ir a la
izquierda |
|
1 |
1 |
0 |
0 |
Cortocircuito |
|
0 |
0 |
1 |
1 |
Cortocircuito |
|
1 |
1 |
1 |
1 |
Cortocircuito |
Módulo Lh298:

- Dibujo Planos

Vista frontal:

Vista lateral:


- Programación en Arduino:
https://drive.google.com/file/d/1whYd81TdBcM-dVEGd2U5gpFFyfEuUUJM/view?usp=sharing
En esta fase, se utilizaron nuevos nombres para la asignación de entradas y salidas, pero el código sigue teniendo la misma estructura ya que cumple su función de controlar los motores.
- Planos eléctricos: https://drive.google.com/file/d/1M6N2RACmoTWspOY7F97OKCkQBt10JJrf/view?usp=sharing
En el plano eléctrico se incluyó el puente h L298N, quien suplanta los leds, recibiendo la señal del arduino y de esta manera activando los motores según el sensor que se encuentre activo.
- Diagrama de flujo algoritmo

- Conclusiones:
En esta fase pudimos comprender el funcionamiento de elementos de potencia por medio de un módulo de montaje de un puente en H, donde aprendimos a controlar desde un instrumento de control elementos de potencia como los motores para impulsar nuestro carro teniendo en cuenta las señales que recibimos de nuestros sensores.
Video funcionamiento del robot:
https://drive.google.com/file/d/139SvEQXEgAjJe3e8rRX5FGgQGtZn1HnZ/view?usp=sharing
Fase V

En la fase V se nos pide describir los cambios finales realizados al robot, el diagrama de bloques del robot, y al menos 3 algoritmos implementados en el robot.
Programas utilizados en el robot:
- Programa encendido de leds: https://drive.google.com/file/d/19o6liuwdoqKfTTAEfu-POwetP9v9OCIM/view?usp=sharing
Diagrama de flujo algoritmo:

Simulación en Proteus encendido de leds: https://drive.google.com/file/d/1vZ0y4JQwwv59DDkWeJtjGwUmg-eSlCS4/view?usp=sharing
2. Programa prueba sensores CNY_70:
Diagrama de flujo algoritmo:

Montaje simulado en
Proteus sobre el sensor CNY70 en el Arduino. https://drive.google.com/file/d/1vr2l8huBIAUKZKEfStB1jhJTJ3dqEkf8/view?usp=sharing
3.
Programa Puente H (Encendido de motores): https://drive.google.com/file/d/1whYd81TdBcM-dVEGd2U5gpFFyfEuUUJM/view?usp=sharing
Diagrama de flujo algoritmo:

Planos eléctricos Puente H: https://drive.google.com/file/d/1M6N2RACmoTWspOY7F97OKCkQBt10JJrf/view?usp=sharing
Planos del robot:

Vista frontal:

Vista lateral:

Vista superior:

Los cambios presentados en esta fase en el robot, son la suplantación de los jumpers que conectaban el Arduino con la protoboard, cambiándose por cable de UTP, siendo más firmes las sujeciones y así evitar averías.

Vídeo funcionamiento:
https://drive.google.com/file/d/17Z-u2OQ1TUe1G0J2IYTm6EWLYbw_BJM9/view?usp=sharing
- Conclusiones:
Fase
VI
En esta fase implementamos una programación PWM para limitar la tensión que reciben los motores, limitándose a 4.5V y se ajustaron los sensores de acuerdo con la medida de la cinta de la pista.
Programación incluyendo PWM para reducir la tensión de los motores: https://drive.google.com/file/d/1B-wEhOJs9Lawj36dJKab32ZGyuvVGUBW/view?usp=sharing
Pista de prueba #1:

Al ver que en ocasiones desalineaba el robot, se decidió realizar una mejora en su estructura para evitar movimientos en los sensores y así evitar futuros desvíos; además, se realizó una nueva pista debido a que la anterior tenía curvas muy pronunciadas que afectaban en el movimiento del robot.
Pista #2:

Vídeo prueba en pista #2: https://drive.google.com/file/d/17tFGTpvGdSsgR-520A1-DredK_N9-Wfn/view?usp=drivesdk
Toma nueva estructura robot:

Vista frontal

Vista superior


Para concluir, con el proyecto se implementaron conocimientos básicos de la electrónica, donde se investigó, ensayó, simuló la estructura y circuito eléctrico del robot.
En cuanto al seguimiento de la línea, nos dimos cuenta que las curvas deben ser suaves, con un amplio recorrido para que el robot no se vea forzado y se detenga o se salga del camino.
Fue interesante su elaboración, ya que al utilizar materiales reciclables,
la sujeción de los materiales tuvo que pensarse muy bien, además, pudimos poner
en práctica lo que deseamos aprender para nuestras vidas, incrementando nuestra
experiencia en el campo.
Comentarios
Publicar un comentario