Francesco V.-Velocista seguidor de linea.


El nombre que se le dio al modelo es Francesco V. en honor a la parodia del aclamado personaje "Francesco Bernoulli", corredor en la película Cars. Se usó como referencia el diseño del automóvil junto a la bandera de Italia y, por esta razón, se motivó a llamarle de esta manera al velocista.

En el presente informe se pretende mostrar el tipo de robot escogido por el grupo además de las razones por las cuales este fue escogido. Adicionalmente, se dan a conocer los materiales para la elaboración de la estructura, los componentes electrónicos y los planos de la estructura. Seguidamente, se expresarán los criterios para la selección de los materiales según la relación costo-beneficio.
Los robots móviles son robots con una base móvil que hace que el robot se mueva libremente en el entorno. Uno de los robots móviles avanzados es el seguidor de línea. En resumidas cuentas estos siguen un camino o trayectoria particular y deciden su propio curso de acción que interactúa con el obstáculo. El camino puede ser una línea negra en el piso blanco (visible) o un campo magnético (invisible). Este movimiento del robot depende completamente de la pista.

Puente H.
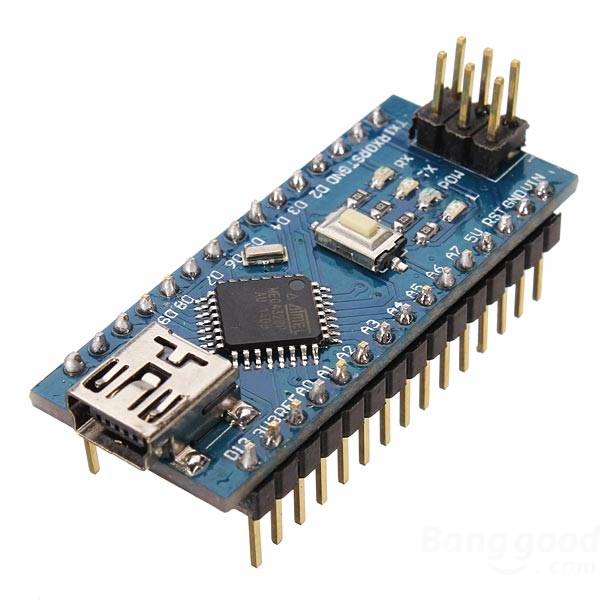
Arduino Nano.
Regulador 5v.
Batería.
Motorreductores.
Regleta.
Leds.
Ruedas de goma.

Arduino Nano V3.0 con Cable: Arduino Nano es el controlador principal del proyecto,es un componente que nos permitirá programar el comportamiento del resto de elementos electrónicos de la pcb. Éste tiene las mismas capacidades que un Arduino UNO, la única diferencia notable es el tamaño que posee, característica que permite administrar mejor el espacio en la PCB.
Motores (motorreductores): Se cuenta con dos motores, los cuales proporcionan torsión a un cuerpo en este caso las ruedas de goma.

Regulador de voltaje Step Down ajustable 3A: Garantiza un nivel de tensión constante para mantener la calidad de vida de los componentes. En este caso será utilizado para ajustar el voltaje suministrado a los elementos de la PCB.

Puente H TB6612FNG: La función de un puente H es permitir a un motor eléctrico girar en ambos sentidos, avanzar y reversa.

Batería Lipo 2s 460mAh 7.4V: Suministra la energía necesaria a la PCB ,permitiendo que la corriente fluya en los respectivos componentes electrónicos.

Linea Qtr 8a Pololu: La regleta es uno de los componentes más importantes en un seguidor de línea debido a que posee 8 sensores los cuales detectan los cambios de color gracias a su mecanismo emisor-receptor, proporcionando al robot un mejor sentido de orientación al realizar giros bruscos disminuyendo la posibilidad de que este se descarrile.

LEDs: Nos ayudan a indicar el estado de diferentes componentes o en general del robot, algunos leds son usados como ayuda para el deslizamiento frontal del robot.

Ruedas de goma: El material de las ruedas le brindan adherencia al piso y así garantizan una mayor estabilidad y velocidad al momento de ponerlo en marcha.


Para la selección de los materiales se tuvo en cuenta la calidad de cada uno de los productos así como su desempeño. Al momento de crear el diseño fue necesario tener mucho cuidado con las medidas de estos para así cumplir con los estándares preestablecidos en las normativas de “Latin-Bot”.

Para el diseño del robot se utilizó el programa de Autodesk, Fusion 360. Con este es posible crear diseños 3D como el anterior, que contribuyen a una mejor visualización del proyecto al estar terminado.












Trabajo Presentado Por: Santiago Giraldo Jimenez (202040258), Daniel Rojas Barreneche (202040170), Juan David Rivera Marín (202040970), Daniela Rosero Narváez (202040861)



Excelente desarrollo y muy claro el concepto de diseño... Felicitaciones
ResponderBorrarFRANCHESCO
ResponderBorrarVIRGOLINIIIII
FIAAAAAAAAAAAAUM
Fiaaaaaauuu
ResponderBorrarExcelente... armado el prototipo desde cero.
ResponderBorrarSon los amos les deseo mucha suerte y lo último que se pierde es la esperanza ánimos papa
ResponderBorrarSúper interesante 🙌🏻
ResponderBorrarMuy interesante proyecto
ResponderBorrarSuper
ResponderBorrarGran proyecto, mil felicitaciones
ResponderBorrarTremendo trabajo, son grandes
ResponderBorrarMuy interesante el proyecto chicos!!!
ResponderBorrar