Sankakkei, Seguidor de linea, Fase IV

Introducción
Drivers
Puente H:

- Circuito Integrado principal: L298N
- Corriente pico de operación: 4 Amperios
- Corriente constante de operación: 2 Amperios
- Voltaje de alimentación de motores: hasta 46 volts
Para controlar los motores se decidió utilizar el driver y/o controlador Puente H, de serial L298N, ya que este a un módico precio y calidad, nos permitió tener un completo control sobre los motores DC usados. Usar el Puente H trajo ciertas ventajas como:
- Hacer girar los motores en ambos sentidos
- Permite invertir la polaridad de los motores y realizar un retroceso
- Se obtuvo una aceleración estable al igual que los giros en base en el sentido que se desea
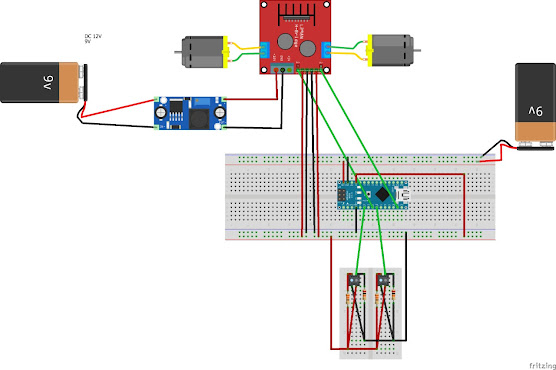
Diagrama de conexión:
El siguiente diagrama representa de manera grafica las conexiones entre cada uno de los componentes en el robot Sankakkei, relacionando motores, puente H, fuentes de alimentacion, Arduino y protoboard:
Imágenes de Montaje






Actualizaciones en el diseño:





Se procedio a actualizar el diseño original del Sankakkei para añadir las mejoras que se han incorporado a lo largo de las diferentes fases, como la nueva fuente de energía, el puente H, protección por BMS y mejoras importantes que han influido en el funcionamiento final del robot autónomo.
Links a los enlaces de programacion y video de funcionamiento:
https://drive.google.com/drive/folders/1rFX3-EjUDV9xQmzL3NttWnJU-pTu8j6D?usp=sharing
Conclusiones:
En relacion al prototipo de la entrega de la primera fase, se ha visto un avance extremadamente notorio, se ha dado la sensacion de satisfaccion entre los integrantes del equipo por nuevos aspectos como el funcionamiento de los motores, ya que integrando el puente H al sistema, se abren nuevas posibilidades de rotacion y comodidad permanente. Permite manipular cada uno de los motores del Sankakkei a favor del programador o del equipo a consiencia. De esta manera, este puente H permite llevar a cabo cada uno de los puntos de esta entregasiendo una nueva parte escencial del robot automata.



Comentarios
Publicar un comentario